Conference Program
You may access the ITSC 2019 Final Program by going to
https://its.papercept.net/conferences/conferences/ITSC19/program/
The projection screens are all in 16:9 ratio.
Program-at-a-Glance
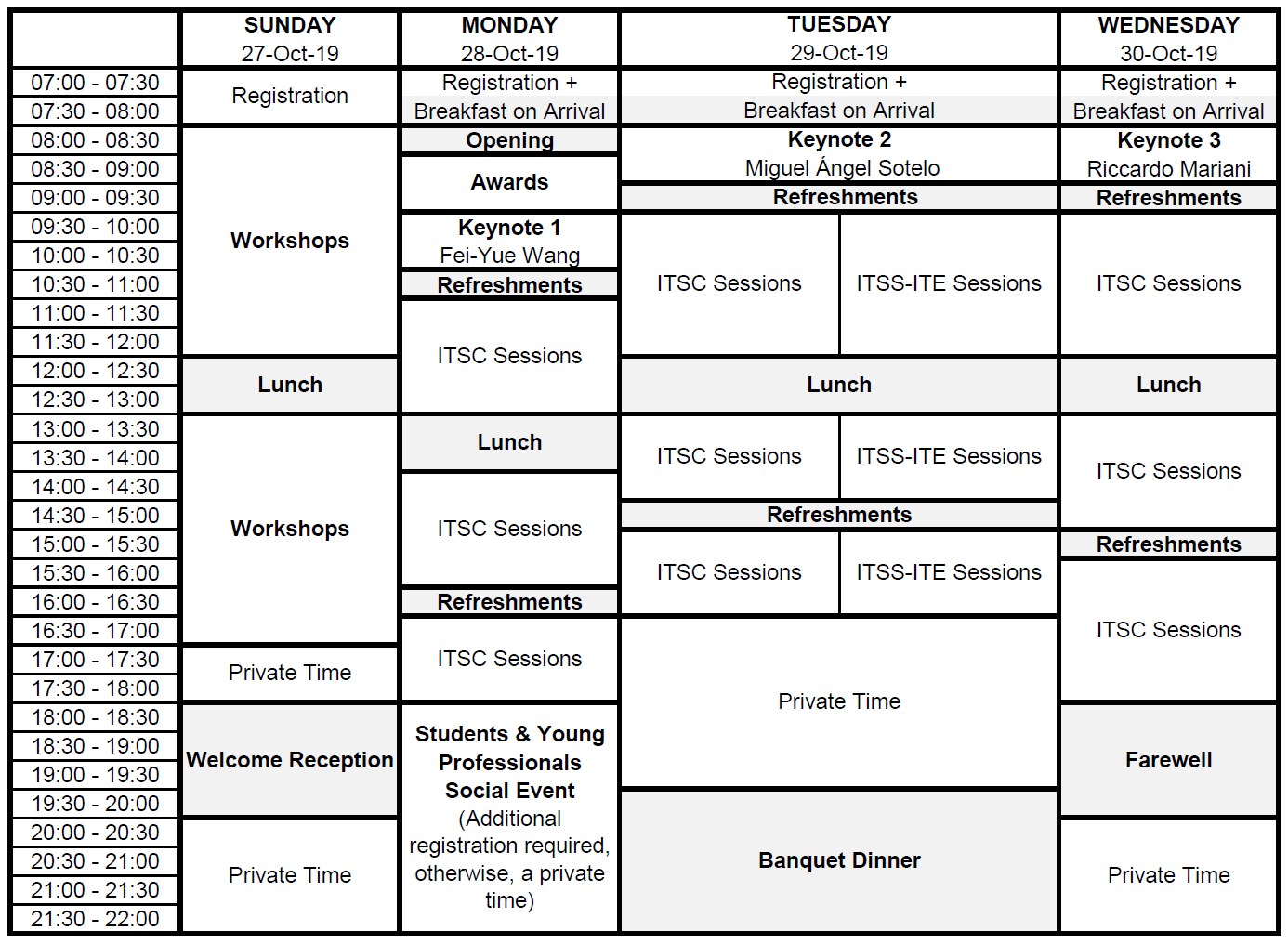
Workshop Sessions Program
All workshop sessions will be held on Sunday, 27 October 2019 at the Conference venue, Hotel Cordis. The projection screens are all in 16:9 ratio.
The following Time Table will apply:
- Morning Sessions Start: 08:00
- Morning Refreshments: 10:00 – 10:30
- Morning Sessions End: 12:00
- Lunch: 12:00 – 13:00
- Afternoon Sessions Start: 13:00
- Afternoon Refreshments: 15:00 – 15:30
- Afternoon Sessions End: 17:00
- All Caterings: The Great Room, Pre-function Area
Workshop Room Allocations
| Workshop | Room | 08:00 - 12:00 | 13:00-17:00 |
|---|---|---|---|
| W1 | Great Room II | √ | √ |
| W2 | Great Room IV | √ | √ |
| W3 | Great Room III | √ | √ |
| W4 | Crystal Room I | √ | √ |
| W5 | Gallery Room 4 | √ | |
| W6 | Gallery Room I | √ | |
| W8 | Great Room I | √ | |
| W9 | Gallery Room 3 | √ | |
| W10 | Gallery Room I | √ | |
| W11 | Crystal Room II | √ | |
| W12 | Gallery Room 4 | √ |
Workshop Sessions:
| Workshop 1 | |
|---|---|
Title | Robust and Generalisable Vehicle Automation |
Abstract | The workshop is aimed at robust and generalisable approaches and strategies to solving key challenges for autonomous vehicle operations, including sensing, localisation, mapping, motion estimation and planning. Through the workshop, we hope to help the intended audience understand how the state-of-the-art work in ITS research community is relevant to improving the robustness and generalisability of one or more of those key components given a realistic urban environment that includes a variety of environmental conditions, and different operating contexts (road, carpark, tunnel, urban canyon, unstructured park, and areas with dynamic obstacles). |
Website | |
| Workshop 2 | |
|---|---|
Title | First International Workshop on Education in Autonomous Driving Technologies |
Abstract | As self-driving vehicle technology is rapidly developed and becomes available to consumers, a diverse range of skills are required. From scientists and engineers to project managers and customer support personnel, all involved must have an understanding of the underlying systems. This brings many challenges to research centers, companies, and higher education institutions. The First International Workshop on Education in Autonomous Driving Technology aims to address the challenges of education in autonomous driving technologies by providing an opportunity to share experiences and discuss best practices for education in this field at all levels. |
Website | |
| Workshop 3 | |
|---|---|
Title | Autonomous and Connected Transportation Systems: Modeling, Control, and Deployment |
Abstract | Public debate about the future of mobility and transportation is increasingly informed by predictions about the impact of Autonomous Vehicles (AVs). As AVs are approaching market-readiness, it becomes more critical that we answer questions about them. This workshop will gather experts from transportation, operations research, robotics, and urban planning in order to: 1. Identify challenges and opportunities for the future of transportation that are triggered by the advent of AVs, 2. Identify modeling and control methodologies to adress them and 3. share insights from early deployments and turn such insights into an actionable research roadmap. |
Website | |
| Workshop 4 | |
|---|---|
Title | Cooperative Automated Driving |
Abstract | The workshop is aimed at robust and generalisable approaches and strategies to solving key challenges for autonomous vehicle operations, including sensing, localisation, mapping, motion estimation and planning. Through the workshop, we hope to help the intended audience understand how the state-of-the-art work in ITS research community is relevant to improving the robustness and generalisability of one or more of those key components given a realistic urban environment that includes a variety of environmental conditions, and different operating contexts (road, carpark, tunnel, urban canyon, unstructured park, and areas with dynamic obstacles). |
Website | https://futurenetworks.ieee.org/conferences/cooperative-and-automated-driving-october-2019 |
| Workshop 5 | |
|---|---|
Title | Urban Trajectory Data Visualization |
Abstract | Massive human trajectory data are produced and utilized to optimize urban transportation. Domain users often conduct iterative, evolving information foraging and sense making, where iterative visual exploration is one key component in the process. In this tutorial, we help researchers and practitioners in the development of visualization systems of big trajectory datasets. The contents are focused on important and practical topics people face when developing a visualization system of urban trajectories. The audience of the tutorial will not only gain knowledge about the visualization techniques of urban trajectory data, but also achieve experiences in implementing online visualization systems. |
Website | |
| Workshop 6 | |
|---|---|
Title | AMoDeus and eqasim: Fleet Control with Behaviorally Responsive Agents |
Abstract | The aim of the tutorial is to familiarize the audience with eqasim, a novel open source transport simulation tool which is based on the well-known agent-based transport simulation framework MATSim. It’s purpose is to allow for behaviourally rich and service-responsive simulation of large-scale daily mobility patterns based on discrete choice theory. Also based on MATSim, AMoDeus adds functionality for simulating small to large fleets of automated taxis with different operational policies for single-use robotic taxis as well as ride-sharing taxis. |
Website | http://www.ivt.ethz.ch/en/info/news/2019/10/27-amodeus-and-eqasim-workshop.html |
|
|
|---|---|
|
|
| |
| Workshop 8 | |
|---|---|
Title | Deep learning for Autonomous Driving : Beyond Perception |
Abstract | Deep Learning has become a de-facto tool in Computer Vision and 3D processing for diverse tasks such as object classification, detection, flow and motion segmentation, mapping, etc. This workshop aims to bridge the gap between in Deep Learning and machine learning methods applied to other vital tasks in the pipeline of a complete autonomous driving system. This includes multi-modal sensor fusion for object detection and tracking, dynamic shared maps, trajectory optimization, path planning, automated sensor calibration, controller optimization, V2V and V2X communication. It aims to bring together the latest research of deep learning applied to various problems in Autonomous Driving. |
Website | |
| Workshop 9 | |
|---|---|
Title | Big Data and Artificial Intelligence Technologies for Urban Mobility and Transportation Planning |
Abstract | With city congestion rises, researchers and city planners are looking for new ways to design and improve transportation systems. Recent advances of big data and artificial intelligence (AI) technologies have great potential and capacity to make transportation systems more efficient, reliable, and sustainable. To this end, developing new concepts/framework/tools/ algorithms/applications for urban mobility and transportation planning with these three tecnologies become more important and promising. The goal of this workshop is to bring together researcher and practitioners from transportation, articial intelligence, big data and high performance computing to discuss challenges and get insights in urban mobility and transportation planning. |
Website | |
| Workshop 10 | |
|---|---|
Title | Decision-making for Self-driving Cars in Dynamic and Complex Environments |
Abstract | To enable self-driving vehicle to make safe decision under dynamic and complex environments, especially in dense traffic environments, the self-driving vehicles firstly need to understand scenes and then use this scene understanding to make robust and effective decisions and perform path planning. Self-driving vehicles also need learning capability to learn from past experience to continually improve driving performance for handling uncertainty in new and unseen scenes. In addition, learning-based systems may make decisions that are not easily explainable to human users, and their safety is difficult to verify. This workshop seeks to explore areas related to these challenges. |
Website | |
| Workshop 11 | |
|---|---|
Title | Workshop on Automated Vehicle Safety: Verification, Validation, and Transparency |
Abstract | Our 2nd ITSC workshop on AV Safety seeks industry unity in solving the safety challenges. We invite academics, researchers, industry professionals, government officials and lawmakers to discuss, challenge and develop a holistic AV Safety model. We will discuss state-of-the-art contributions to verification, validation and transparency of AV safety. Paper submissions will be complemented with industry and government insights into the challenges and applicability methods in automated driving worldwide. We encourage an active dialogue in a panel Q&A with presenters and invited industry figures. We seek to inspire collaboration in this open dialogue of your contributions, points of view and visions. |
Website | |
| Workshop 12 | |
|---|---|
Title | Smart Initiatives and Intelligent Freight Transportation |
Abstract | A rapid development of new ITS technologies has created opportunities for resolving critical freight transportation challenges. Freight Advanced Traveler Information System, Freight Dynamic Route Guidance, Drayage Optimization present some of already developed applications. Potential applications of CAVs in freight transportation, Freight Signal Priority, development, testing and implementation of new algorithms for logistic and relocation problems are some of the areas researched for future implementation in the Smart Freight Mobility System. This workshop will address critical issues affecting planning, design, operation, and safety of the nation’s inter modal freight transportation systems, in order to strengthen economic competitiveness through efficient freight mobility. |
Website | |